Project Video Demo
Project Overview
The Hammerhead was our robot for the 2018 ME218b project. This year's competition was themed around the Olympics, and thus required two robots to play head-to-head in a game that was similar to a combination of basketball and hockey. Both robots started in opposite corners of the field, and initially had to race to their side's reload stations in order to receive a game ball. The first to reload would gain offensive possession first. When on Offense, a robot could score in their opponent's goal at the other end of the field in one of two ways: They could either lob the ball in a high arc to score in the opening at the top of the goal, or roll the ball along the ground into a low arch at the bottom of the goal. After scoring one goal or after a semi-randomized shot clock ran out, possession would change to the other team. When on Defense, a robot could take any defensive action it wished, including reloading early, but it could not extend itself in the XY plane or intentionally come into contact with the other robot for an extended period of time. The full detailed rules and requirements are attached below.
In terms of overall systems requirements, the robots could not be larger than a 1 foot cube, and they could only be driven by the two provided motors. In order to reload, the robot would have to identify the period of an IR signal coming out of the reload station and respond with its own IR signal that was half the period in a "handshake" maneuver. Beyond that, many different optional systems could be used for positioning on the field. IR beacons were located at each goal and reload station, black tape was placed connecting reload stations and in front of goals, and a color gradient was spread across the field for potential color sensing.
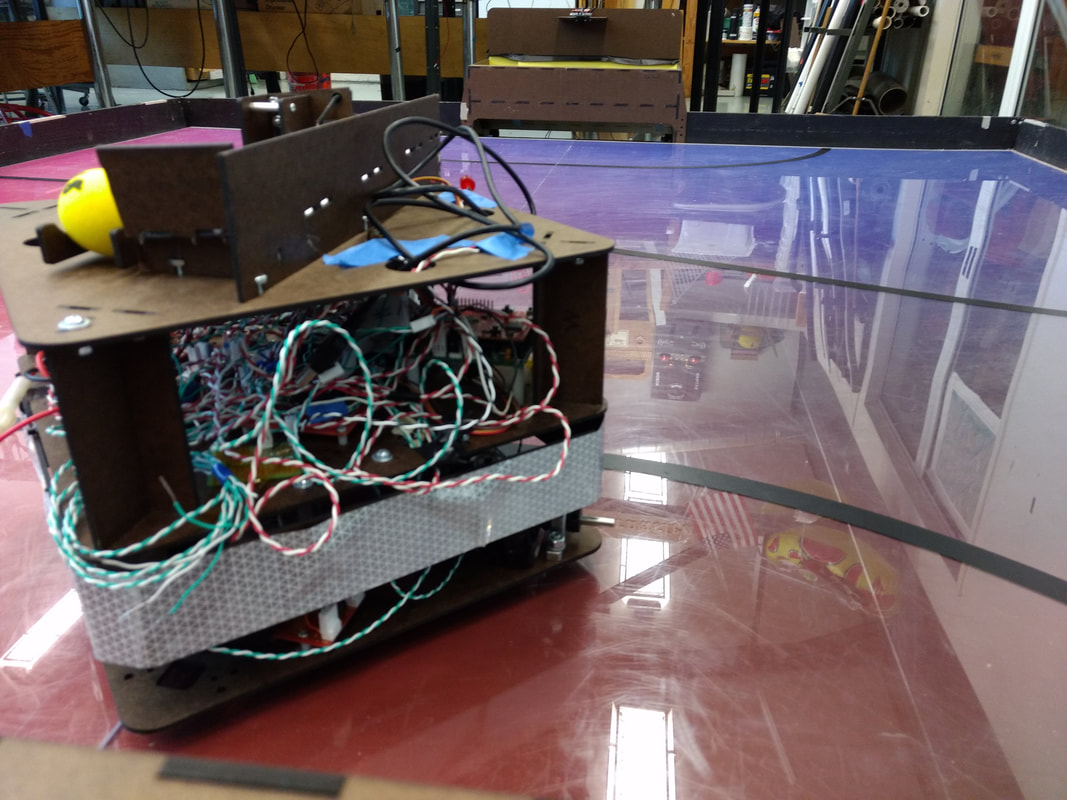
Our team created a straightforward, layered design with a unique profile that maximized our defensive footprint. For sensing chose to use IR beacons and Encoder dead reckoning in order to position our robot, and we used a spring-loaded launcher for repeatability when making a shot. Our basic strategy during the game would be to get to the reload station as fast as possible and use our spring launcher to make a consistent shot on the goal. On defense, we would drive near our goal to maximize how much of it we were blocking with our robot profile. The links above detail our mechanical, electrical, and software design ideas and implementations.
In terms of overall systems requirements, the robots could not be larger than a 1 foot cube, and they could only be driven by the two provided motors. In order to reload, the robot would have to identify the period of an IR signal coming out of the reload station and respond with its own IR signal that was half the period in a "handshake" maneuver. Beyond that, many different optional systems could be used for positioning on the field. IR beacons were located at each goal and reload station, black tape was placed connecting reload stations and in front of goals, and a color gradient was spread across the field for potential color sensing.
Our team created a straightforward, layered design with a unique profile that maximized our defensive footprint. For sensing chose to use IR beacons and Encoder dead reckoning in order to position our robot, and we used a spring-loaded launcher for repeatability when making a shot. Our basic strategy during the game would be to get to the reload station as fast as possible and use our spring launcher to make a consistent shot on the goal. On defense, we would drive near our goal to maximize how much of it we were blocking with our robot profile. The links above detail our mechanical, electrical, and software design ideas and implementations.
| me218bproject.pdf |
The Team

These are the Team 14 members: Mengxi Zhao, Wesley Guo, Siddhesh Dhanawade
